TIKI SAFETY AB
the customer Chiesa Artorige s.r.l. GIT000424 is a manufacturer of die-cutting machines with over 60 years of experience in the market.
To try to differentiate themselves from the competition, they thought of integrating an automatic unloading exhaust system on the machine, this with a view to making the machine faster and more precise, but also to protect the operator from the monotonous work of unloading the machine.
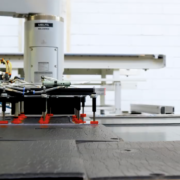
The challenge was to create a system with multiple gripping points that could be activated or deactivated in compartments to ensure the grip of different formats. These are gripping tools that manage to handle up to 5 different sizes each.
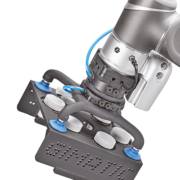
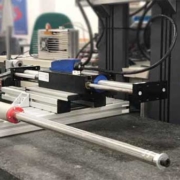
The gripping elements are made up of Gimatic EMF-2525 profiles on which compensated suction cup suspensions and flat silicone suction cups have been applied. To frame the gripping hand there is a VSX1435 push system that allows to help the detachment of the cut product by separating it from the scrap during the picking phase.
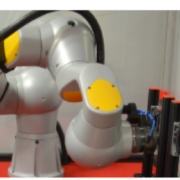
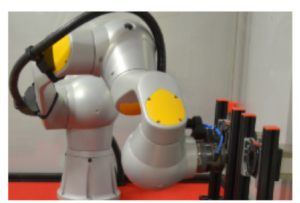
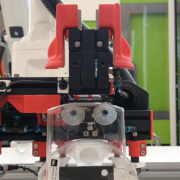
The gripping hands have been equipped with a QC150 quick changer system, this allows you to change tools in a few seconds, ensuring continuity of pneumatic wiring between the robot side and the tool side.
For this project, we collaborated 360 ° with the customer, first of all providing a technical visit that allowed us to collect all the data that were used by the design office to develop the final product, in addition, the hands of the robot were completely assembled and wired by our technicians in order to supply a turnkey product that the customer only had to install on the robot wrist.
We have managed to fully satisfy the customer’s needs.